“如果智能驾驶系统不能彻底摆脱高精度地图,谈何端到端。”
6月1日,元戎启行CEO周光在粤港澳大湾区车展暨2024(第二届)未来汽车先行者大会上表示。
这并非周光第一次强调“无图”方案与端到端模型的强因果关系,早在今年4月的北京车展,周光就有此言论,并推出不搭载高精度地图和应用端到端模型的高阶智驾平台DeepRoute IO。
所谓“无图”方案,是指不搭载高精度地图的智能驾驶方案,这是目前智能驾驶行业公认的技术趋势。然而,要真正实现“无图”方案,不仅要重构整个技术架构,提升感知系统的灵敏度,更要加强系统对整个行车场景理解能力。这对大多数技术公司而言,是一项非常艰巨的任务。
因此,这些公司不得不采用“走捷径”的方法摆脱高精度地图。最常见的是使用基于高精度地图制作的定制化地图,当然也有公司尝试在导航地图上进行各种“修补”和“堆叠”,例如打补丁、堆先验、定制图层等,这些方法在周光眼中实际都是对高精度地图的变相依赖。
周光认为,上述所述的“无图”的方案,都是伪“无图”方案,不仅没有真正地摆脱对高精度地图的依赖,降低成本,长期来看,还无法打造端到端模型。而端到端模型,才是训练出具有自我学习与自我判断能力的 AI 汽车的关键所在。
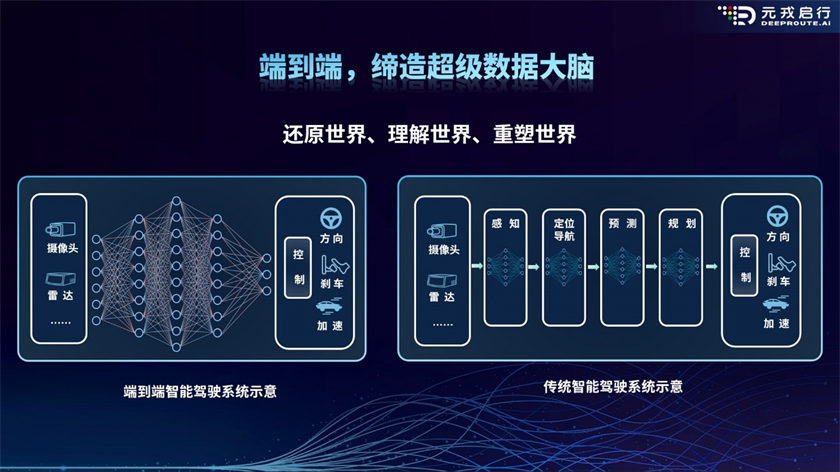
他解释,端到端模型,如同人类大脑的神经网络,更擅长看非结构化的数据,如图片与视频。而高精度地图是一堆精确的三维表征,是结构化数据的堆砌。对端到端模型来说,高精度地图是一堆深奥的数字代码,难以理解,反而更直观的图片与视频道路信息,可以与它同频,并让它轻松获取信息。“就像人类一样,人类可以马上理解图片、视频想要传达的信息,但不能立即理解一堆复杂的结构化数据背后的意义。”
元戎启行早在2020年就开始研发“无图”方案,并于2023年推出完全摆脱高精度地图,只搭载导航地图的“无图”方案。基于“无图”方案,元戎启行于2023年8月完成了端到端模型的道路测试,并在2024年推出了有端到端模型的高阶智驾平台DeepRoute IO。目前,元戎启行已经与多家车企进行量产合作,将于今年推动端到端模型进入消费者市场。
随着端到端模型进入消费者市场,元戎启行将会获得到海量的脱敏真实行车数据,进一步推动技术迭代。预计2025年元戎启行将采用NVIDIA的DRIVE Thor芯片适配公司的端到端智能驾驶模型。元戎启行是业内首批能用 DRIVE Thor芯片适配端到端模型的企业。
“端到端模型为我们缔造了一颗强大的数字大脑,这是打造AI汽车最重要的一环。我畅想的AI汽车是具身智能的体现,可以感受我们的情绪,与我们对话,把我们带到想去的地方,能够为我们撬开通用人工智能时代的大门。”周光说。